




教育方案
国内第一家小型化、原型化、场景化、标准化工业数字孪生平台厂商
3D打印小型水下机器人ARMs
1、概述
水下机器人ARMs 1.0是一款集教学与科研目的为一体的便携式小尺度流线形水下机器人,其满足日常学生船舶原理和自控原理相关教学实验的同时,兼顾流体力学分析、船舶操纵性研究、导航制导控制设计等学科专业研究。本平台提供一套便携式水下机器人硬件组件,基本的艇载嵌入式运动控制程序和岸基监控软件,便于开展学习船舶原理、控制系统设计和集成、嵌入式程序编写和调试、自控算法设计和验证、岸基监控软件开发和联调等方面工作,完整系统具备远程遥控操纵、自主操纵性试验、自主循迹航行等能力。
ARMs 1.0系统组成见图1,其由水下机器人本体和岸基监控组成,两者通过光纤、WiFi或无线电进行通信。
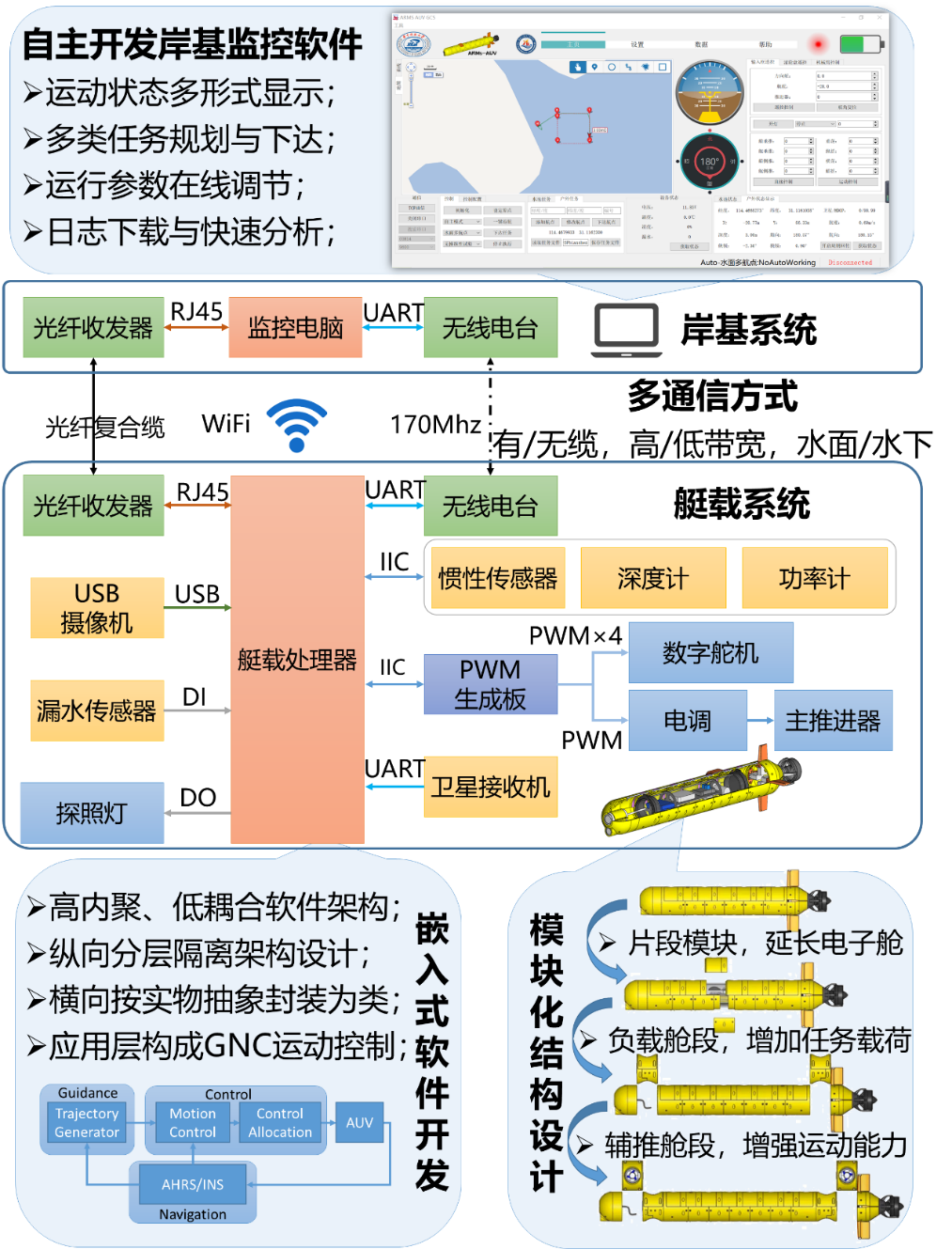
图1 ARMs 1.0系统组成
2、系统特点
Ø模块化外形结构设计,以片段或舱段的方式更换附体、延长电子舱、拓展负载、更换动力形式;
Ø集总式控制系统集成,将艇载电子设备集总到艇载树莓派计算机上,满足算力和IO能力的同时减少系统复杂度;
Ø分层嵌入式程序架构,纵向分层隔离,提供与硬件设备“一对一”的功能模块层模块,用户只需调用下层API进行应用层开发;
Ø功能完备的系统案例,提供机器人应用层程序和岸基监控软件作为二次开发案例,案例具备遥控和自主航行、任务下达、参数设置、日志下载分析等功能。
3、技术参数

表1 ARMs 1.0技术参数
4、实验内容
Ø水下机器人认知实验(船舶原理、机器人原理、坐标系、数学建模、自主控制系统);
Ø水下机器人接口验证实验(状态采集、无线通信、数据可视化);
Ø遥控操纵实验(水下机器人运动原理、系统运行和摇操步骤);
Ø操纵性实验(操纵性试验流程、自主操纵程序、数据分析);
Ø自主控制实验(定向航行、定深航行、路径跟踪)。
5、实验示例
5.1操纵性实验
实验目标
(1)了解多种操纵试验的流程和方法,如Z形操纵、回转操纵、超越试验和空间螺旋试验等;
(2)掌握艇载程序框架,植入待执行的操纵自主控制程序;
(3)分析航行日志,提取操纵性指标,评估水下机器人操纵性能;
试验方法
操纵性试验用于检验机器人操纵性能的优劣,为机器人摇操人员提供操纵性资料,为设计和科研提供数据资料。首先了解标准操纵性试验的流程、关键指标和数据分析方法。然后根据不同操纵的操舵流程编写自主控制程序,进行干态调试和水中航行试验。最后下载航行日志,分析航行数据,提取关键操纵指标,如Z性操纵的超越角,回转操纵的回转半径和周期。

图2 湖试场景
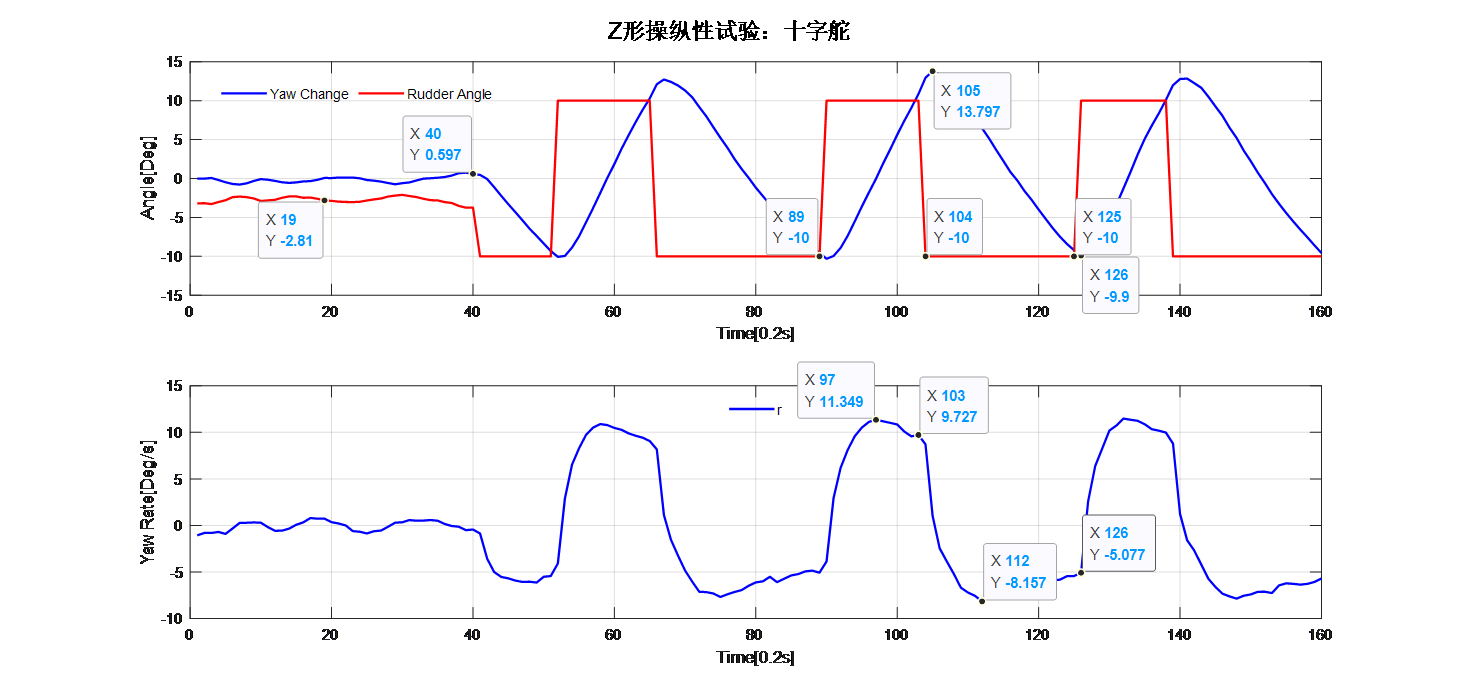
图3 Z形操纵试验

图4 空间螺旋试验
5.2定向航行实验
实验目标
(1)了解反馈控制思想和经典PID控制器及参数整定方法;
(2)掌握艇载程序框架,植入艏向跟踪PID控制程序;
(3)进行艏向跟踪调试和PID参数整定航行实验;
实验方法
针对水下机器人的艏向跟踪目标,绘制出如图5所示的反馈控制框图,其中AHRS作为传感器提供艏向反馈,控制器输入艏向误差计算舵角指令,方向舵为执行机构提供转艏力矩,整个闭环系统使水下机器人跟踪给定艏向航行。

图5 艏向自动控制框图
控制器采用PID方法,其框图见图6。输入艏向跟踪误差,根据当前误差,误差积分和误差微分加权计算出方向舵控制舵角。
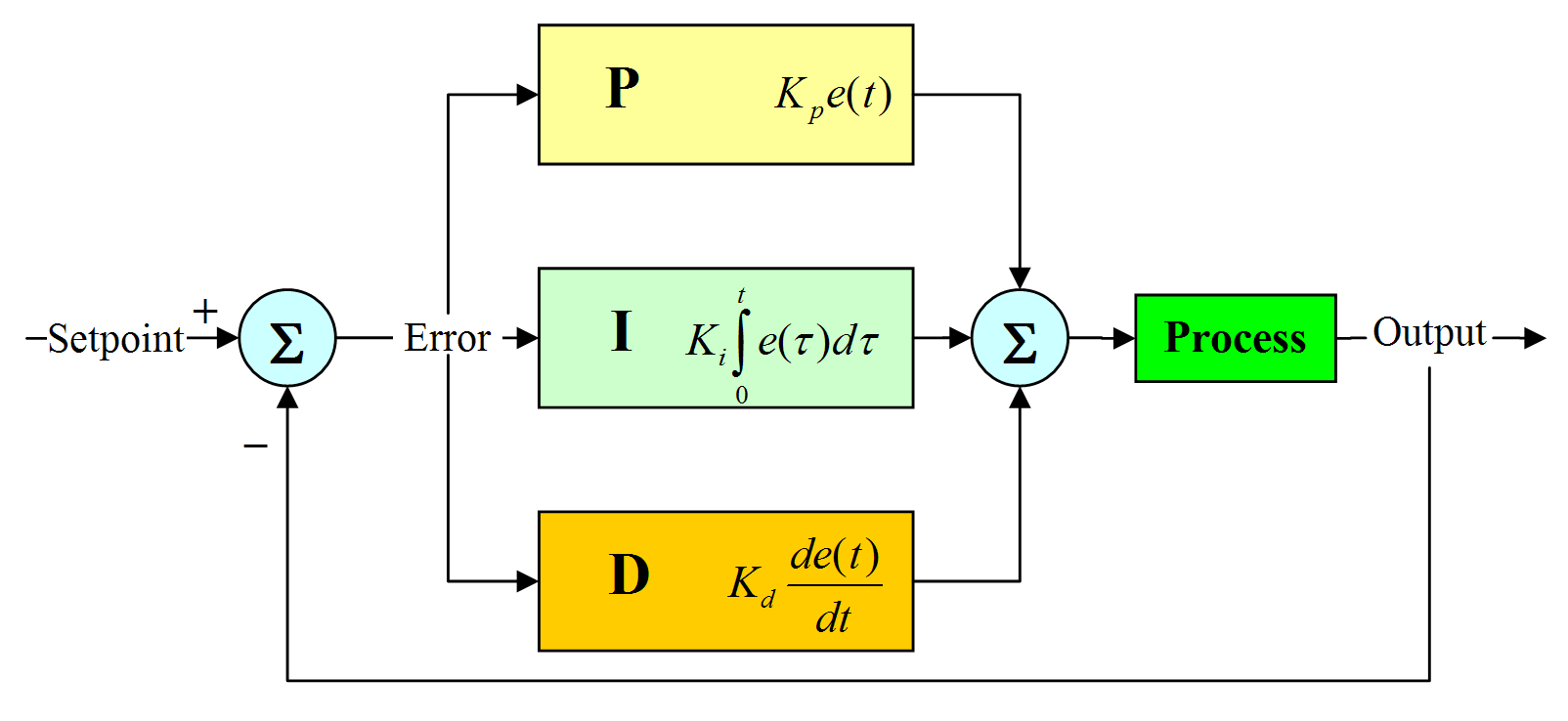
图6 PID控制框架
通过调整PID增益,可使艏向跟踪精度优于1度,见图7。
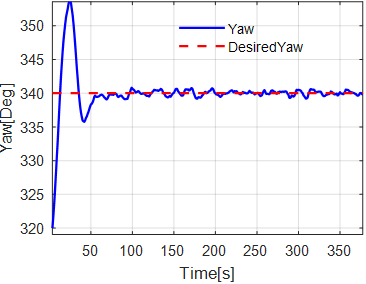
图7 艏向跟踪曲线
5.3单环控制定深航行试验
实验目标
(1)了解反馈控制思想和非线性控制理论;
(2)学习自抗扰控制架构和方法;
(3)设计深度跟踪自抗扰控制方法并部署;
(4)进行深度跟踪控制试验并整定控制参数;
实验方法
针对水下机器人的深度跟踪目标,绘制出如图8所示的反馈控制框图,其中深度计作为传感器提供深度反馈,控制器输入深度误差计算舵角指令,升降舵为执行机构提供转艏力矩,整个闭环系统使水下机器人跟踪给定深度航行。

图8 深度自动控制框图
控制器采用自抗扰控制方法,其框图见图9。其核心思想是通过扩张状态观测器输入反馈深度和升降舵舵角估计出深度运动的复合干扰,并将其补偿到非线性误差反馈计算的控制量中。首先使用跟踪微分器为输入信号安排过渡过程,并给出过渡过程的微分信号。然后将误差和误差微分输入到非线性误差反馈计算控制量,最后在控制量中补偿扩张状态观测器观测出的复合干扰作为最终的升降舵控制量。
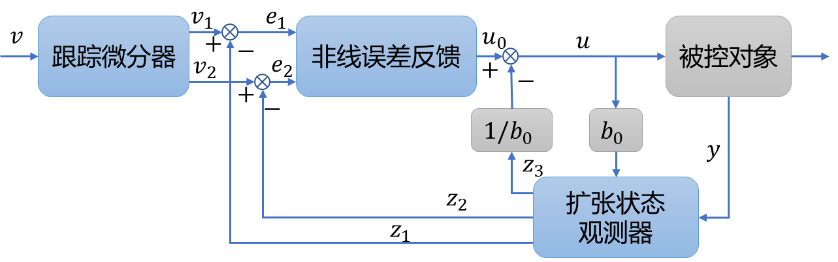
图9 自抗扰控制框图
自抗扰控制为非线性控制,具有优越的抗扰能力通过调整控制器增益,可使深度跟踪精度优于1厘米,见图10。
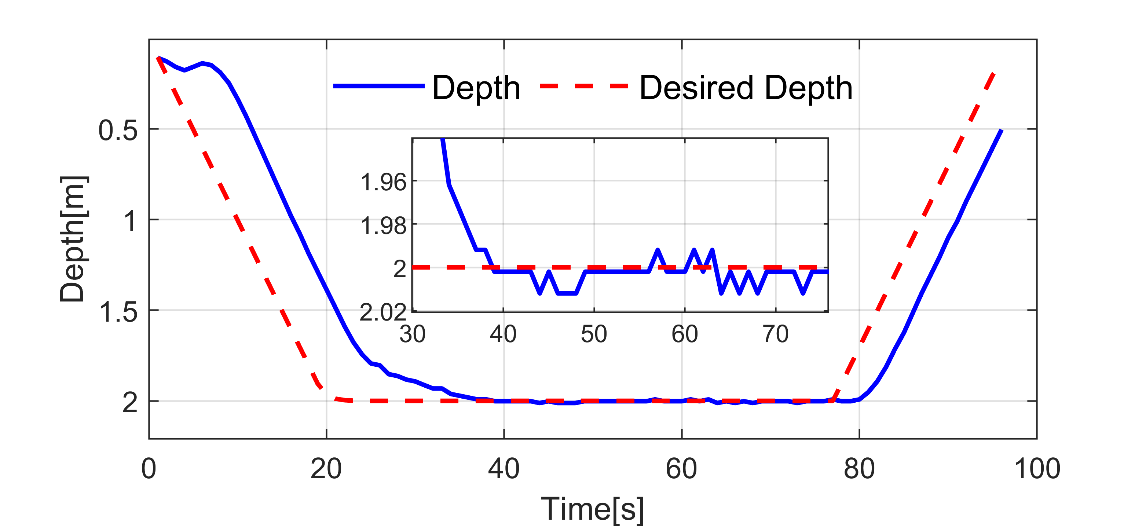
图10深度自抗扰跟踪曲线